概述
服务器上的进程可能有上千条连接,如何快速的知道哪条连接来了网络数据,正是epoll要解决的问题。在早期,linux内核采用的select 和 poll。结论是在连接数很多,活跃的连接少的情况下epoll有高效的性能优势,原因之一是epoll唤醒进程后,只需要查看就绪(有数据)的socket,而不是遍历整个socket集合。多路复用指的是进程的复用,本文重点描述epoll原理
Socket 数据结构
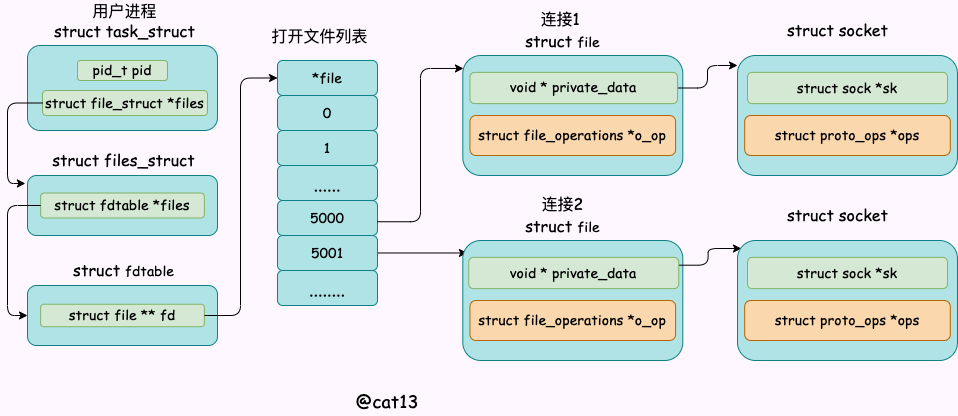
当服务器执行accept后会阻塞,等待客户端的连接请求。如果客户端发起连接,三次握手后,服务器会创建一个新的socket,用于客户端和服务器的通信。本着linux一切皆为文件的原则,socket 也是一种文件描述符。并且把它加入当前进程的打开文件列表中
socket
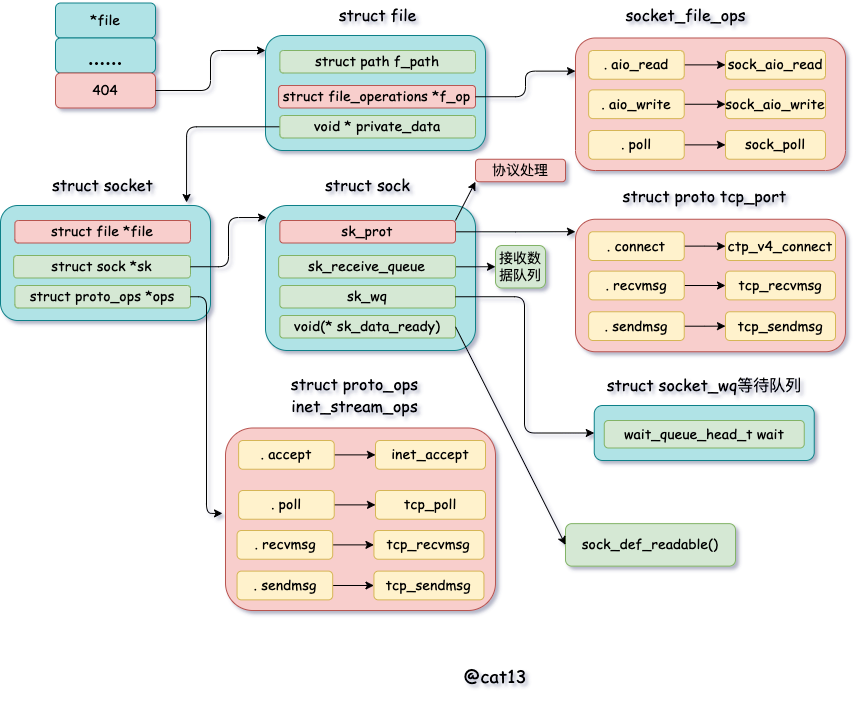
socket 内核对象具体的细节如图所示
socket_detail
创建 Socket
用户(用户程序)调用accept系统调用后,当接收到连接时会创建socket对象。其源码位于net/socket.c 截取部分代码所示:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
SYSCALL_DEFINE4 ( accept4 , int , fd , struct sockaddr __user * , upeer_sockaddr ,
int __user * , upeer_addrlen , int , flags )
{
struct socket * sock , * newsock ;
//根据 fd 查找到监听的 socket
sock = sockfd_lookup_light ( fd , & err , & fput_needed );
// 申请并初始化新的 socket
newsock = sock_alloc ();
newsock -> type = sock -> type ;
newsock -> ops = sock -> ops ;
//申请新的 file 对象,并设置到新 socket 上
newfile = sock_alloc_file ( newsock , flags , sock -> sk -> sk_prot_creator -> name );
......
//接收连接
err = sock -> ops -> accept ( sock , newsock , sock -> file -> f_flags );
//添加新文件到当前进程的打开文件列表
fd_install ( newfd , newfile );
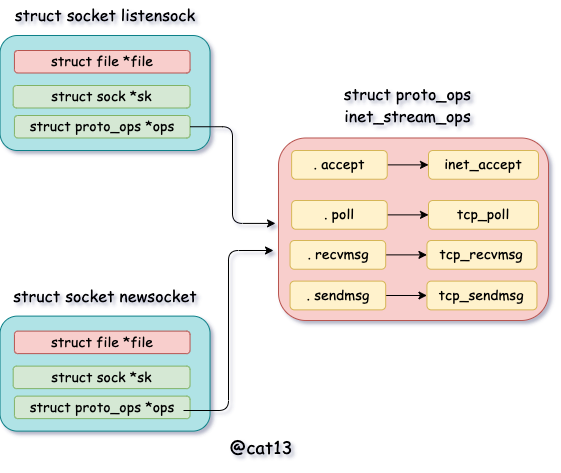
上述代码中可以看出,先找出一个listen状态的socket,随即malloc 出一个新的socket对象,拷贝type,ops(指针拷贝)。由前面的socket数据结构可知ops是struct proto_ops inet_stream_ops。如图所示:
socket_ops
其中 inet_stream_ops 起源码位于net/ipv4/af_inet.c ,截取部分代码如下
1
2
3
4
5
6
7
8
9
10
11
const struct proto_ops inet_stream_ops = {
. family = PF_INET ,
. owner = THIS_MODULE ,
. release = inet_release ,
. bind = inet_bind ,
. connect = inet_stream_connect ,
. socketpair = sock_no_socketpair ,
. accept = inet_accept ,
. getname = inet_getname ,
. poll = tcp_poll ,
......
创建file对象
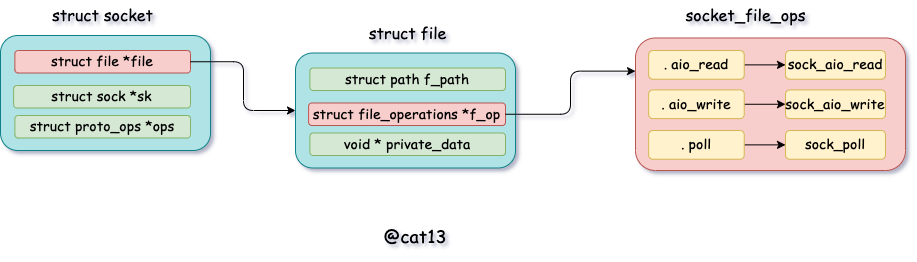
前面提到的socket数据结构中,有个重要字段file。在accept方法里面会调用sock_alloc_file来初始化,然后赋值给新的socket对象,如图所示:
socket_file
sock_alloc_file 源码如下:
1
2
3
4
5
6
7
8
9
struct file * sock_alloc_file ( struct socket * sock , int flags ,
const char * dname )
{
struct file * file ;
file = alloc_file ( & path , FMODE_READ | FMODE_WRITE ,
& socket_file_ops );
......
sock -> file = file ;
}
sock_alloc_file 里面回调用 alloc_file。注意在 alloc_file 方法中,把 socket_file_ops 函数集合一并赋到了新 file->f_op 里了。其源码位于fs/file_table.c
1
2
3
4
5
6
7
8
struct file * alloc_file ( struct path * path , fmode_t mode ,
const struct file_operations * fop )
{
struct file * file ;
file -> f_op = fop ;
......
}
可以看出,在accept里创建的新socket 的file->f_op->poll 函数指向的是 sock_poll。另外file对象内部有个socket指针,指向socket对象。
接收连接
socket结构中除了file,还有一个核心的成员sock。其源码位于include/linux/net.h 。部分源码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
struct socket {
socket_state state ;
short type ;
unsigned long flags ;
struct file * file ;
struct sock * sk ;
const struct proto_ops * ops ;
struct socket_wq wq ;
};
sock 是socket的核心对象。发送队列、接收队列、等待队列等核心数据结构都位于此
在accept 函数中,其源码位于net/socket.c ,部分源码如下
1
2
3
4
5
SYSCALL_DEFINE4 ( accept4 , ...)
...
//1.3 接收连接
err = sock -> ops -> accept ( sock , newsock , sock -> file -> f_flags );
}
sock->ops->accept 对应的方法是 inet_accept。它执行的时候会从握手队列里直接获取创建好的 sock。 sock 对象的完整创建过程涉及到三次握手。 struct sock 初始化过程中用到的一个函数:
1
2
3
4
5
void sock_init_data ( struct socket * sock , struct sock * sk )
{
sk -> sk_wq = NULL ;
sk -> sk_data_ready = sock_def_readable ;
}
在这里把 sock 对象的 sk_data_ready 函数指针设置为 sock_def_readable 。后面还会提到这个sock_def_readable
加入当前进程的打开文件列表中
当file,socket,sock等对象初始化完毕后,还需要将其挂到当前进程的打开文件列表中
1
2
3
4
5
6
7
8
9
10
11
12
13
void fd_install ( unsigned int fd , struct file * file )
{
__fd_install ( current -> files , fd , file );
}
void __fd_install ( struct files_struct * files , unsigned int fd ,
struct file * file )
{
...
fdt = files_fdtable ( files );
BUG_ON ( fdt -> fd [ fd ] != NULL );
rcu_assign_pointer ( fdt -> fd [ fd ], file );
}
epoll数据结构
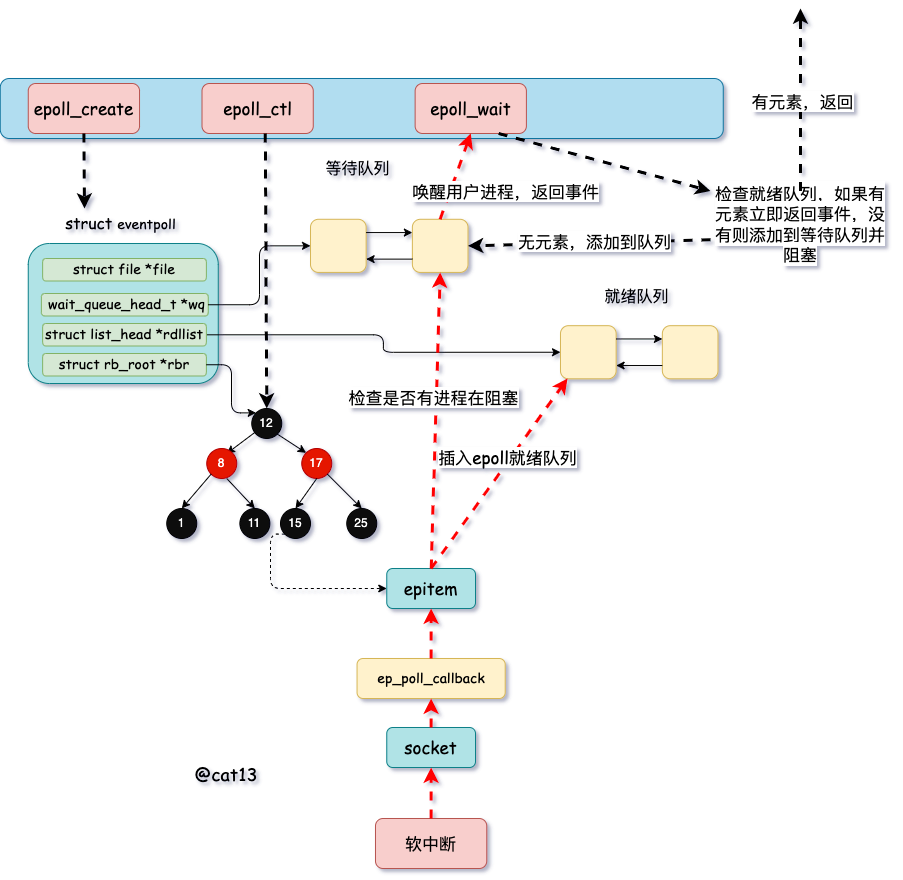
epoll 暴露出来的API非常简单,epoll_create,epoll_ctl,epoll_wait
epoll_create:创建一个epoll对象
epoll_ctl:管理epoll_item,epoll_item与socket关联
epoll_wait:等待管理的socket IO事件
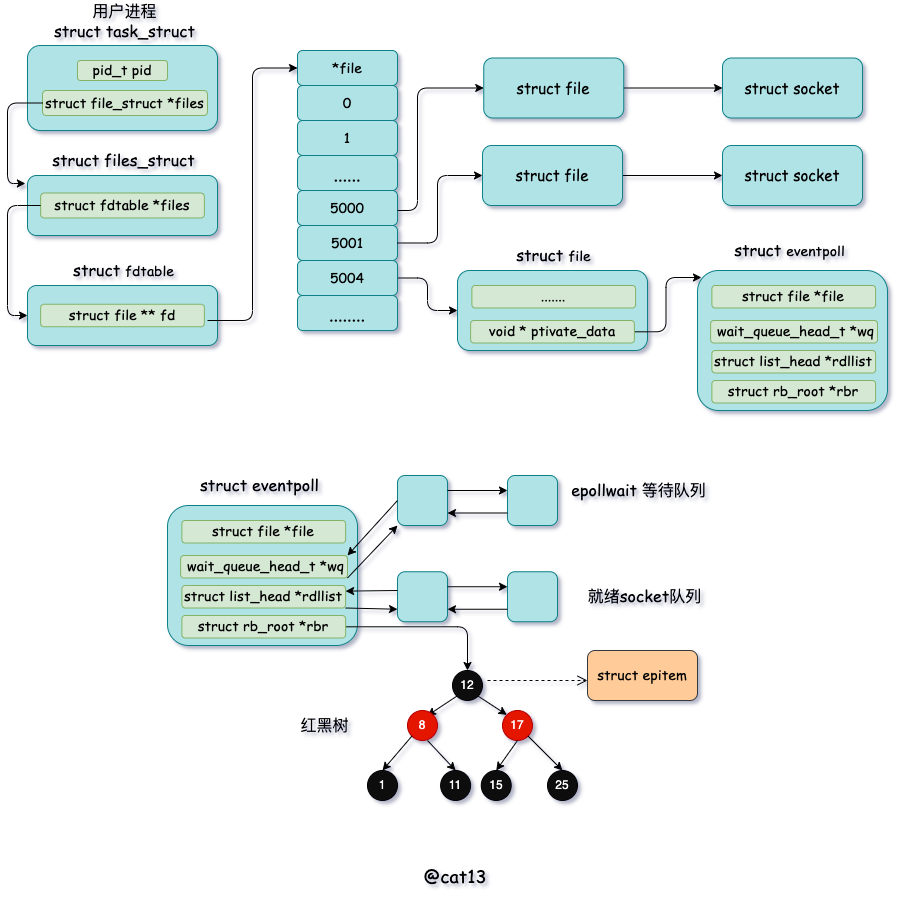
和socket一样,调用epoll_create创建出来的event_poll会和当前进程打开的文件列表关联。
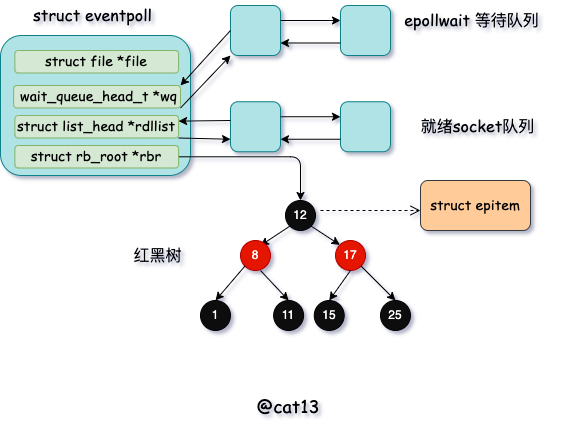
eventpoll
epoll_create 其源代码位于fs/eventpoll.c ,其中struct eventpoll 的定义也在这个源文件中。部分代码如下所示:
1
2
3
4
5
6
7
SYSCALL_DEFINE1 ( epoll_create1 , int , flags )
{
struct eventpoll * ep = NULL ;
//创建eventpoll 对象
error = ep_alloc ( & ep );
}
1
2
3
4
5
6
7
8
9
10
11
12
13
struct eventpoll {
//sys_epoll_wait用到的等待队列
wait_queue_head_t wq ;
//接收就绪的描述符都会放到这里
struct list_head rdllist ;
//每个epoll对象中都有一颗红黑树
struct rb_root rbr ;
......
}
wq :等待进程队列双向链表。软中断数据就绪的时候会通过 wq 来找到阻塞在 epoll 对象上的用户进程rbr :红黑树。通过这棵树来管理用户进程下添加的socket连接rdllist : 就绪socket描述符双向链表。当有的连接就绪的时候,内核会把就绪的连接放到 rdllist 链表里。这样进程只需要判断链表就能找出就绪进程,而不用去遍历整棵树
eventpoll被创建出来,还需要初始化, 其源代码位于fs/eventpoll.c ,部分代码如下所示:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
static int ep_alloc ( struct eventpoll ** pep )
{
struct eventpoll * ep ;
//申请 epollevent 内存
ep = kzalloc ( sizeof ( * ep ), GFP_KERNEL );
//初始化等待队列头
init_waitqueue_head ( & ep -> wq );
//初始化就绪列表
INIT_LIST_HEAD ( & ep -> rdllist );
//初始化红黑树指针
ep -> rbr = RB_ROOT ;
......
}
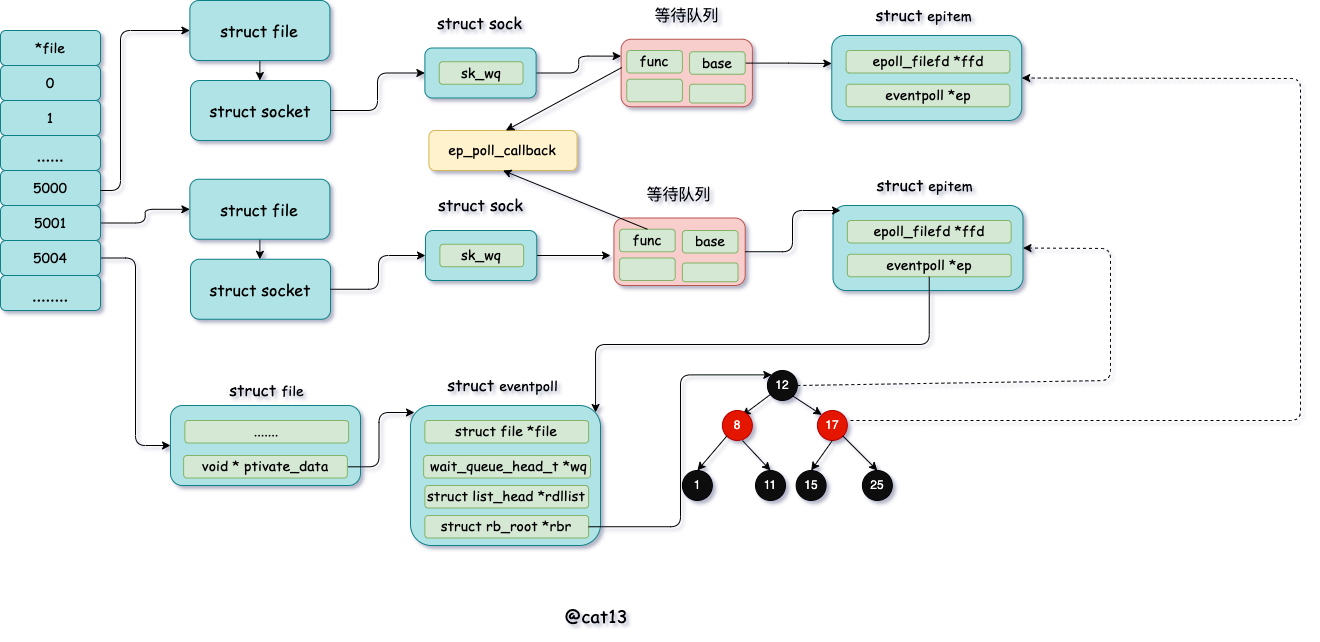
epoll_ctl 添加socket
当epoll_ctl注册每个socket的时候,会做三件事情
分配一个红黑树节点对象epitem
添加等待事件到socket的等待队列中,其回调函数是ep_poll_callback
将epitem插入 rdllist红黑树中
通过epoll_ctl 添加两个socket后,结构如下图
epoll_ctl
epoll_ctl 添加socket 的源码位于fs/eventpoll.c ,部分代码如下所示:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
SYSCALL_DEFINE4 ( epoll_ctl , int , epfd , int , op , int , fd ,
struct epoll_event __user * , event )
{
struct eventpoll * ep ;
struct file * file , * tfile ;
//根据 epfd 找到 eventpoll 内核对象
file = fget ( epfd );
ep = file -> private_data ;
//根据 socket 句柄号, 找到其 file 内核对象
tfile = fget ( fd );
switch ( op ) {
case EPOLL_CTL_ADD :
if ( ! epi ) {
epds . events |= POLLERR | POLLHUP ;
error = ep_insert ( ep , & epds , tfile , fd );
} else
error = - EEXIST ;
clear_tfile_check_list ();
break ;
}
epoll_ctl 添加操作,会走到这个EPOLL_CTL_ADD case,重点看下ep_insert函数,其源码位于fs/eventpoll.c ,部分代码如下所示:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
static int ep_insert ( struct eventpoll * ep ,
struct epoll_event * event ,
struct file * tfile , int fd )
{
//3.1 分配并初始化 epitem
//分配一个epi对象
struct epitem * epi ;
if ( ! ( epi = kmem_cache_alloc ( epi_cache , GFP_KERNEL )))
return - ENOMEM ;
//对分配的epi进行初始化
//epi->ffd中存了句柄号和struct file对象地址
INIT_LIST_HEAD ( & epi -> pwqlist );
epi -> ep = ep ;
ep_set_ffd ( & epi -> ffd , tfile , fd );
//3.2 设置 socket 等待队列
//定义并初始化 ep_pqueue 对象
struct ep_pqueue epq ;
epq . epi = epi ;
init_poll_funcptr ( & epq . pt , ep_ptable_queue_proc );
//调用 ep_ptable_queue_proc 注册回调函数
//实际注入的函数为 ep_poll_callback
revents = ep_item_poll ( epi , & epq . pt );
......
//3.3 将epi插入到 eventpoll 对象中的红黑树中
ep_rbtree_insert ( ep , epi );
......
}
epitem 初始化
epitem 数据结构 位于struct epitem ,部分代码如下所示:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
struct epitem {
//红黑树节点
struct rb_node rbn ;
//socket文件描述符信息
struct epoll_filefd ffd ;
//所归属的 eventpoll 对象
struct eventpoll * ep ;
//等待队列
struct list_head pwqlist ;
}
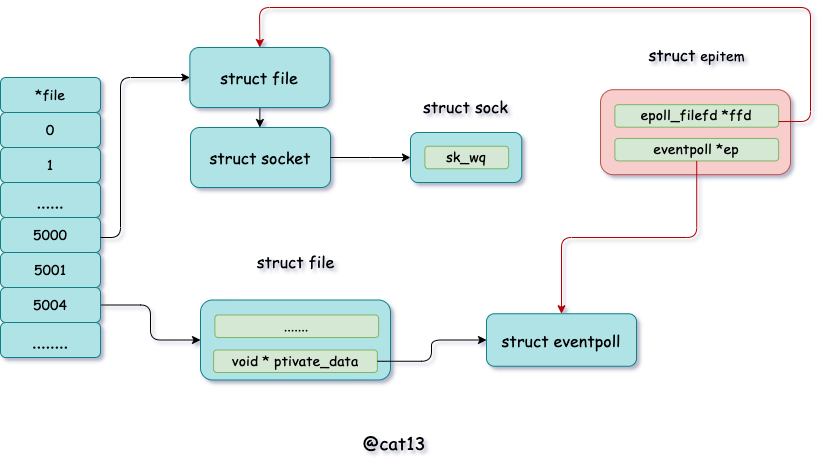
对epitem部分初始化,包括关联一个eventpoll对象,关联socket 的file字段
epitem
关联file字段代码位于ep_set_ffd
1
2
3
4
5
6
7
/* Setup the structure that is used as key for the RB tree */
static inline void ep_set_ffd ( struct epoll_filefd * ffd ,
struct file * file , int fd )
{
ffd -> file = file ;
ffd -> fd = fd ;
}
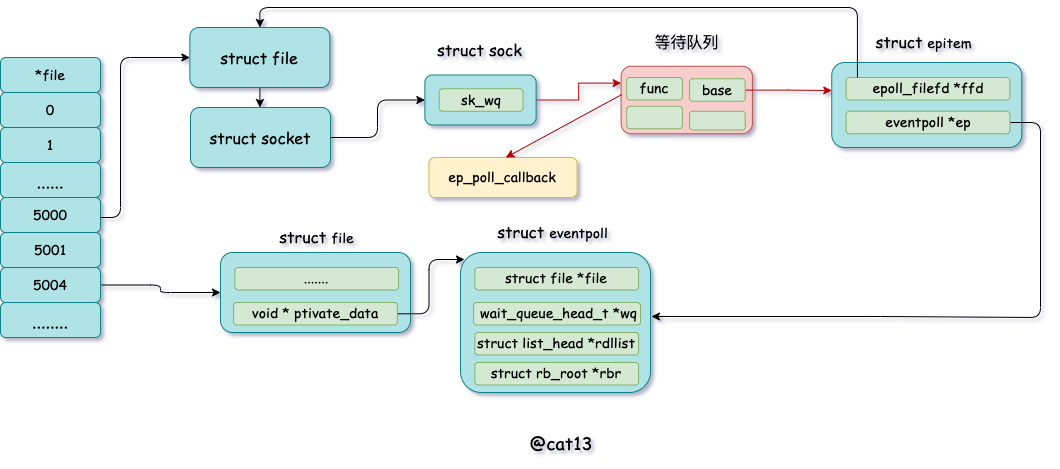
设置socket等待队列
ep_poll_callback
epitem初始化后,接下来就设置socket等待队列。并把ep_poll_callback设置成回调函数
1
2
3
4
5
6
static inline unsigned int ep_item_poll ( struct epitem * epi , poll_table * pt )
{
pt -> _key = epi -> event . events ;
return epi -> ffd . file -> f_op -> poll ( epi -> ffd . file , pt ) & epi -> event . events ;
}
结合socket的结构图中可以看出,sock->ops->poll 其实指向的是 tcp_poll。
1
2
3
4
5
6
unsigned int tcp_poll ( struct file * file , struct socket * sock , poll_table * wait )
{
struct sock * sk = sock -> sk ;
sock_poll_wait ( file , sk_sleep ( sk ), wait );
}
sock_poll_wait 第二个参数是调用sk_sleep获得的,其实就是socket的等待队列
1
2
3
4
5
static inline wait_queue_head_t * sk_sleep ( struct sock * sk )
{
BUILD_BUG_ON ( offsetof ( struct socket_wq , wait ) != 0 );
return & rcu_dereference_raw ( sk -> sk_wq ) -> wait ;
}
进入sock_poll_wait
1
2
3
4
5
6
7
8
9
10
11
static inline void sock_poll_wait ( struct file * filp ,
wait_queue_head_t * wait_address , poll_table * p )
{
poll_wait ( filp , wait_address , p );
}
static inline void poll_wait ( struct file * filp , wait_queue_head_t * wait_address , poll_table * p )
{
if ( p && p -> _qproc && wait_address )
p -> _qproc ( filp , wait_address , p );
}
这里的 qproc 是个函数指针,它在前面的 init_poll_funcptr 调用时被设置成了 ep_ptable_queue_proc 函数。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
static int ep_insert (...)
{
...
init_poll_funcptr ( & epq . pt , ep_ptable_queue_proc );
...
}
//file: include/linux/poll.h
static inline void init_poll_funcptr ( poll_table * pt ,
poll_queue_proc qproc )
{
pt -> _qproc = qproc ;
pt -> _key = ~ 0UL ; /* all events enabled */
}
在 ep_ptable_queue_proc 函数中,新建了一个等待队列项,并注册其回调函数为ep_poll_callback函数。然后再将这个等待项添加到 socket 的等待队列中 。
1
2
3
4
5
6
7
8
9
10
11
12
static void ep_ptable_queue_proc ( struct file * file , wait_queue_head_t * whead ,
poll_table * pt )
{
struct eppoll_entry * pwq ;
f ( epi -> nwait >= 0 && ( pwq = kmem_cache_alloc ( pwq_cache , GFP_KERNEL ))) {
//初始化回调方法
init_waitqueue_func_entry ( & pwq -> wait , ep_poll_callback );
//将ep_poll_callback放入socket的等待队列whead(注意不是epoll的等待队列)
add_wait_queue ( whead , & pwq -> wait );
}
在epoll之前,由于需要在数据就绪的时候唤醒用户进程,所以等待对象项的 private 会设置成当前用户进程描述符 current。 而我们今天的 socket 是交给 epoll 来管理的,不需要在一个 socket 就绪的时候就唤醒进程,所以这里的 q->private 没有用就设置成了 NULL
1
2
3
4
5
6
7
8
9
10
static inline void init_waitqueue_func_entry (
wait_queue_t * q , wait_queue_func_t func )
{
q -> flags = 0 ;
q -> private = NULL ;
//ep_poll_callback 注册到 wait_queue_t对象上
//有数据到达的时候调用 q->func
q -> func = func ;
}
可以看出,软中断将数据拷贝到socket 的接收队列后,会通过ep_poll_callback回调函数通知epoll对象
插入红黑树
分配完epitem 对象后,会把它插入到红黑树中
rbr
为什么要红黑树呢 ?
epoll_wait等待接收
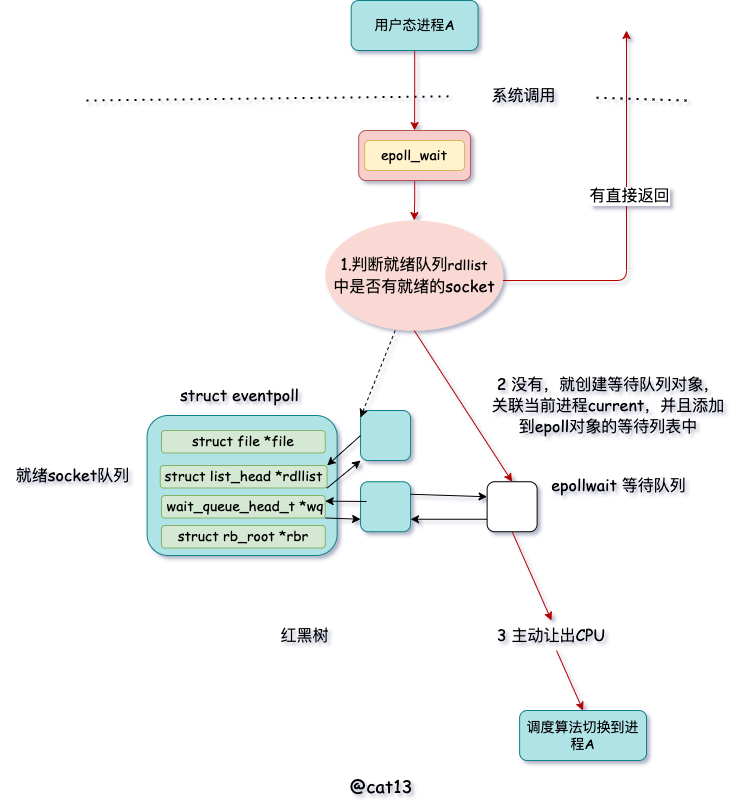
当epoll_wait被调用的时候,会判断eventpoll->rdllist 链表里有没有数据,如果有数据就返回,没有数据就创建一个等待队列的元素,然后添加到eventpoll等待队列上。其过程大致如下
epoll_wait
值得注意的是epoll_ctl 添加 socket 时也创建了等待队列项。不同的是这里的等待队列项是挂在 epoll 对象上的,而前者是挂在 socket 对象上的。
其源代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
//file: fs/eventpoll.c
SYSCALL_DEFINE4 ( epoll_wait , int , epfd , struct epoll_event __user * , events ,
int , maxevents , int , timeout )
{
...
error = ep_poll ( ep , events , maxevents , timeout );
}
static int ep_poll ( struct eventpoll * ep , struct epoll_event __user * events ,
int maxevents , long timeout )
{
wait_queue_t wait ;
......
fetch_events :
//4.1 判断就绪队列上有没有事件就绪
if ( ! ep_events_available ( ep )) {
//4.2 定义等待事件并关联当前进程
init_waitqueue_entry ( & wait , current );
//4.3 把新 waitqueue 添加到 epoll->wq 链表里
__add_wait_queue_exclusive ( & ep -> wq , & wait );
for (;;) {
...
//4.4 让出CPU 主动进入睡眠状态
if ( ! schedule_hrtimeout_range ( to , slack , HRTIMER_MODE_ABS ))
timed_out = 1 ;
...
}
判断就绪队列有没有就绪的socket,代码如下所示
1
2
3
4
static inline int ep_events_available ( struct eventpoll * ep )
{
return ! list_empty ( & ep -> rdllist ) || ep -> ovflist != EP_UNACTIVE_PTR ;
}
阻塞当前进程,将创建出来的待队列对象与当前进程关联,设置唤醒回调函数
1
2
3
4
5
6
static inline void init_waitqueue_entry ( wait_queue_t * q , struct task_struct * p )
{
q -> flags = 0 ;
q -> private = p ;
q -> func = default_wake_function ;
}
添加到等待队列
1
2
3
4
5
6
static inline void __add_wait_queue_exclusive ( wait_queue_head_t * q ,
wait_queue_t * wait )
{
wait -> flags |= WQ_FLAG_EXCLUSIVE ;
__add_wait_queue ( q , wait );
}
通过 set_current_state 把当前进程设置为可打断。 调用 schedule_hrtimeout_range 让出 CPU,主动进入睡眠状态
1
2
3
4
5
6
7
8
9
10
11
12
int __sched schedule_hrtimeout_range ( ktime_t * expires ,
unsigned long delta , const enum hrtimer_mode mode )
{
return schedule_hrtimeout_range_clock (
expires , delta , mode , CLOCK_MONOTONIC );
}
int __sched schedule_hrtimeout_range_clock (...)
{
schedule ();
...
}
在 schedule 中选择下一个进程调度
1
2
3
4
5
6
static void __sched __schedule ( void )
{
next = pick_next_task ( rq );
...
context_switch ( rq , prev , next );
}
数据从网卡到进程
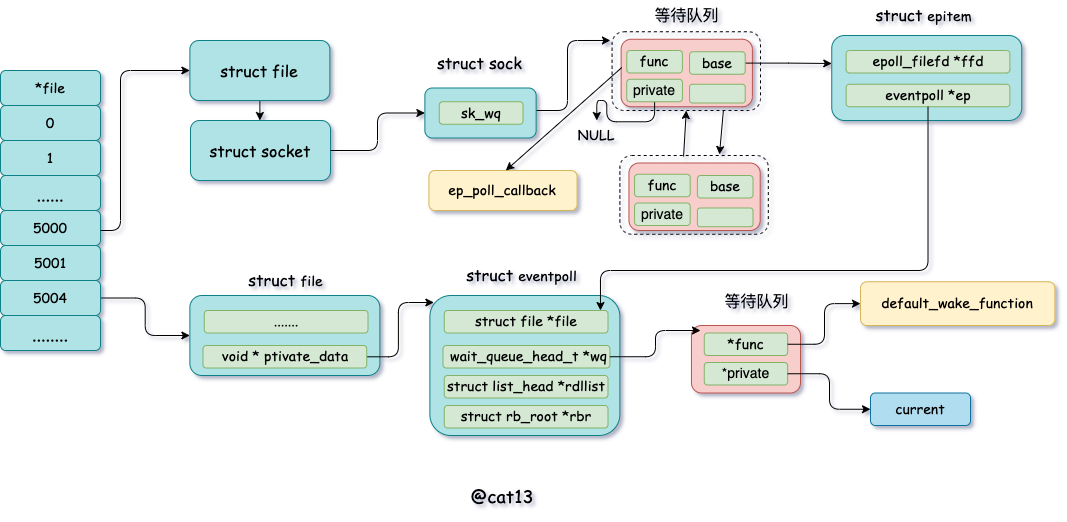
在前面 epoll_ctl 执行的时候,会给每一个 socket 添加回调函数(等待队列对象)。 在 epoll_wait 运行完的时候,会给event_poll添加等待队列对象。数据开始接收之前,先把这些队列项的内容再稍微总结一下。
epoll
socket->sock->sk_data_ready 设置的就绪处理函数是 sock_def_readable在socket等待队列中,回调函数是ep_poll_callback,private字段没有作用,置为NULL
在 eventpoll 的等待队列项中,回调函数是 default_wake_function。其 private 指向的是等待该事件的用户进程。
接收数据到任务队列
软中断来的时候会一步一步往协议上层分解。网络帧->tcp数据包,这里重点分析tcp协议栈的处理入口函数 tcp_v4_rcv
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
// file: net/ipv4/tcp_ipv4.c
int tcp_v4_rcv ( struct sk_buff * skb )
{
......
th = tcp_hdr ( skb ); //获取tcp header
iph = ip_hdr ( skb ); //获取ip header
//根据数据包 header 中的 ip、端口信息查找到对应的socket
sk = __inet_lookup_skb ( & tcp_hashinfo , skb , th -> source , th -> dest );
......
//socket 未被用户锁定
if ( ! sock_owned_by_user ( sk )) {
{
if ( ! tcp_prequeue ( sk , skb ))
ret = tcp_v4_do_rcv ( sk , skb );
}
}
}
在 tcp_v4_rcv 中首先根据收到的网络包的 header 里的 source 和 dest 信息来在本机上查询对应的 socket。找到以后,就进入接收的主体函数 tcp_v4_do_rcv 。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
//file: net/ipv4/tcp_ipv4.c
int tcp_v4_do_rcv ( struct sock * sk , struct sk_buff * skb )
{
if ( sk -> sk_state == TCP_ESTABLISHED ) {
//执行连接状态下的数据处理
if ( tcp_rcv_established ( sk , skb , tcp_hdr ( skb ), skb -> len )) {
rsk = sk ;
goto reset ;
}
return 0 ;
}
//其它非 ESTABLISH 状态的数据包处理
......
}
如果处理的是 ESTABLISH 状态下的包,这样就又进入 tcp_rcv_established 函数中
1
2
3
4
5
6
7
8
9
10
//file: net/ipv4/tcp_input.c
int tcp_rcv_established ( struct sock * sk , struct sk_buff * skb ,
const struct tcphdr * th , unsigned int len )
{
......
//接收数据到队列中
eaten = tcp_queue_rcv ( sk , skb , tcp_header_len , & fragstolen );
//数据 ready,唤醒 socket 上阻塞掉的进程
sk -> sk_data_ready ( sk , 0 );
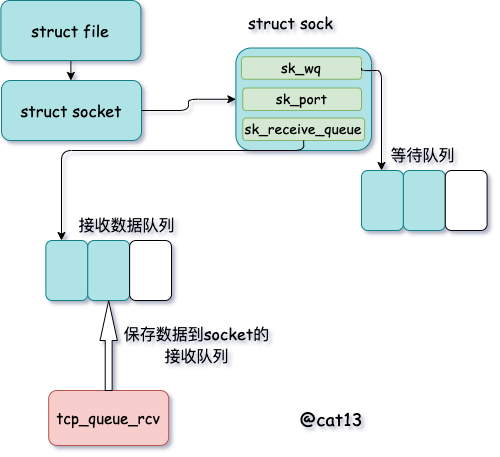
在 tcp_rcv_established 中通过调用 tcp_queue_rcv 函数中完成了将接收数据放到 socket 的接收队列上。
tcp_queue_rcv
如下源码所示:
1
2
3
4
5
6
7
8
9
10
11
//file: net/ipv4/tcp_input.c
static int __must_check tcp_queue_rcv ( struct sock * sk , struct sk_buff * skb , int hdrlen ,
bool * fragstolen )
{
//把接收到的数据放到 socket 的接收队列的尾部
if ( ! eaten ) {
__skb_queue_tail ( & sk -> sk_receive_queue , skb );
skb_set_owner_r ( skb , sk );
}
return eaten ;
}
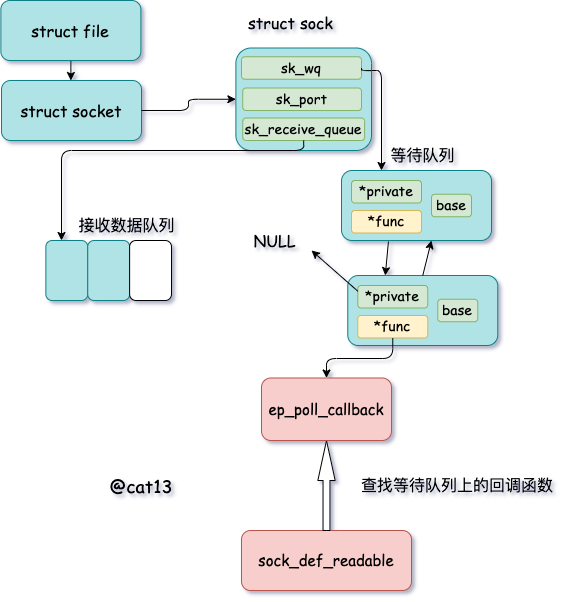
查找就绪回调函数
调用 tcp_queue_rcv 接收完成之后,接着再调用 sk_data_ready 。 在 accept 函数创建 socket 流程里提到的 sock_init_data 函数,在这个函数里已经把 sk_data_ready 设置成 sock_def_readable 函数了。它是默认的数据就绪处理函数。当 socket 上数据就绪时候,内核将以 sock_def_readable 这个函数为入口,找到 epoll_ctl 添加 socket 时在其上设置的回调函数ep_poll_callback。
poll_callback
具体代码如下所示:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
//file: net/core/sock.c
static void sock_def_readable ( struct sock * sk , int len )
{
struct socket_wq * wq ;
rcu_read_lock ();
wq = rcu_dereference ( sk -> sk_wq );
//这个名字起的不好,并不是有阻塞的进程,
//而是判断等待队列不为空
if ( wq_has_sleeper ( wq ))
//执行等待队列项上的回调函数
wake_up_interruptible_sync_poll ( & wq -> wait , POLLIN | POLLPRI |
POLLRDNORM | POLLRDBAND );
sk_wake_async ( sk , SOCK_WAKE_WAITD , POLL_IN );
rcu_read_unlock ();
}
重点看下wake_up_interruptible_sync_poll
1
2
3
4
5
6
7
8
9
10
11
12
//file: include/linux/wait.h
#define wake_up_interruptible_sync_poll(x, m) \
__wake_up_sync_key((x), TASK_INTERRUPTIBLE, 1, (void *) (m))
//file: kernel/sched/core.c
void __wake_up_sync_key ( wait_queue_head_t * q , unsigned int mode ,
int nr_exclusive , void * key )
{
...
__wake_up_common ( q , mode , nr_exclusive , wake_flags , key );
}
接着进入 __wake_up_common
1
2
3
4
5
6
7
8
9
10
11
12
13
static void __wake_up_common ( wait_queue_head_t * q , unsigned int mode ,
int nr_exclusive , int wake_flags , void * key )
{
wait_queue_t * curr , * next ;
list_for_each_entry_safe ( curr , next , & q -> task_list , task_list ) {
unsigned flags = curr -> flags ;
if ( curr -> func ( curr , mode , wake_flags , key ) &&
( flags & WQ_FLAG_EXCLUSIVE ) && !-- nr_exclusive )
break ;
}
}
在 __wake_up_common 中,选出等待队列里注册某个元素 curr, 回调其 curr->func。 在 ep_insert 调用的时候,把这个 func 设置成 ep_poll_callback 了。
执行ep_poll_callback
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
//file: fs/eventpoll.c
static int ep_poll_callback ( wait_queue_t * wait , unsigned mode , int sync , void * key )
{
//获取 wait 对应的 epitem
struct epitem * epi = ep_item_from_wait ( wait );
//获取 epitem 对应的 eventpoll 结构体
struct eventpoll * ep = epi -> ep ;
//1. 将当前epitem 添加到 eventpoll 的就绪队列中
list_add_tail ( & epi -> rdllink , & ep -> rdllist );
//2. 查看 eventpoll 的等待队列上是否有在等待
if ( waitqueue_active ( & ep -> wq ))
wake_up_locked ( & ep -> wq );
在 ep_poll_callback根据等待任务队列项上的额外的 base 指针可以找到 epitem, 进而也可以找到 eventpoll 对象。首先它做的第一件事就是把自己的 epitem 添加到 epoll 的就绪队列中 。接着它又会查看 eventpoll 对象上的等待队列里是否有等待项(epoll_wait 执行的时候会设置)如果没执行软中断的事情就做完了。如果有等待项,那就查找到等待项里设置的回调函数default_wake_function。
执行epoll就绪通知
在 default_wake_function 中找到等待队列项里的进程描述符,然后唤醒之
代码如下所示:
1
2
3
4
5
6
//file:kernel/sched/core.c
int default_wake_function ( wait_queue_t * curr , unsigned mode , int wake_flags ,
void * key )
{
return try_to_wake_up ( curr -> private , mode , wake_flags );
}
等待队列项 curr->private 指针是在 epoll 对象上等待而被阻塞掉的进程。将 epoll_wait 进程推入可运行队列,等待内核重新调度进程。然后 epoll_wait 对应的这个进程重新运行后,就从 schedule 恢复当进程醒来后,继续从 epoll_wait 时暂停的代码继续执行。把 rdlist 中就绪的事件返回给用户进程
1
2
3
4
5
6
7
8
9
10
11
12
13
14
//file: fs/eventpoll.c
static int ep_poll ( struct eventpoll * ep , struct epoll_event __user * events ,
int maxevents , long timeout )
{
......
__remove_wait_queue ( & ep -> wq , & wait );
set_current_state ( TASK_RUNNING );
}
check_events :
//返回就绪事件给用户进程
ep_send_events ( ep , events , maxevents ))
}
总结
event_poll_all
所有的回调:
sock_def_readable: sock 对象初始化时设置的ep_poll_callback : epoll_ctl 时添加到 socket 上default_wake_function: epoll_wait 是设置到 epoll 上的
为什么epoll 会如此高效呢,我想大概是因为,socket接收到软中断后不用马上唤醒进程,由epoll接管。当epoll唤醒进程后,只需要查看rdllist 就绪队列就知道哪些socket有数据,多路复用,复用的是进程。因为频繁的进程切换是效率低下的重要原因之一。